38-1. I-P制御
PI制御(Integral-Proportional Control)(I-P制御はPI制御と異なる部分もあるが、制御要素は共通である)は、比例制御(P制御)と積分制御(I制御)の2つの要素を組み合わせた制御方法で、制御対象プロセスの応答を改善し、安定性を向上させるために使用される。
PI制御(I-P制御)の主要な要素は、
1)比例制御(P制御):P制御は、偏差(目標値と出力の差)に比例した操作量を生成する。P制御は、システムが目標値にどれだけ近づいているかを観測し、偏差が大きい場合には出力を増加させ、偏差が小さい場合には出力を減少させる。P制御は、過度の振動やオーバーシュートを引き起こすことがあるため、単独ではしばしば不安定な制御をもたらす。
2)積分制御(I制御):I制御は、偏差の積分値に比例した操作量を生成する。これは時間にわたる累積偏差を反映する。I制御は、静止状態の偏差(定常偏差)を除去する役割がある。つまり、システムが目標値に収束するようにする。I制御は、定常偏差を解消することができ、理論的には安定した制御を提供するが、オーバーシュートや振動の問題を引き起こすことがある。
PI制御(I-P制御)は、比例制御と積分制御を組み合わせ、システムの応答を改善し、目標値に収束する速度と安定性を向上させる。PI制御(I-P制御)の調整パラメータ(P制御のゲインとI制御のゲイン)を適切に設定することが重要であり、異なるプロセスやシステムに合わせて調整する必要がある。このような制御方法は、電力制御、温度制御、速度制御、圧力制御など、さまざまなアプリケーションで使用されている。
PI制御とI-P制御
制御対象をパワーエレクトロニクスであるモータ駆動回路(モータのコイル、すなわち、インダクタを駆動する電気回路)として、PI制御とI-P制御の相違を考える。
※I-P制御の具体例として、例えば、「ゲイン調整以外の制御性能の改善方法「I-P制御」とは」が参考になる。
PI制御とI-P制御の違いは、比例要素(P)と積分要素(I)の適用順序ではないことに注意する必要がある。
図1「PI制御の構成」と図2「I-P制御の構成」を見てわかるように、PI制御では偏差を基に比例要素、積分要素を作用させて操作量を得る。式で表すと$$U(s) =\left( \frac{K_i}{s} + K_p \right)E(s) \;\;\cdots (1)$$となる。一方、I-P制御では、偏差に積分要素を作用させた量から、出力に比例要素を作用させた量を減算したものから操作量を得る。式で表すと$$U(s) = \frac{K_i}{s} E(s) - K_p Y(s)\;\;\cdots(2) $$となる。
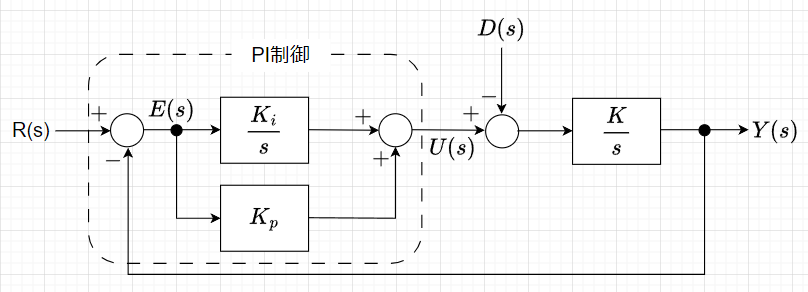
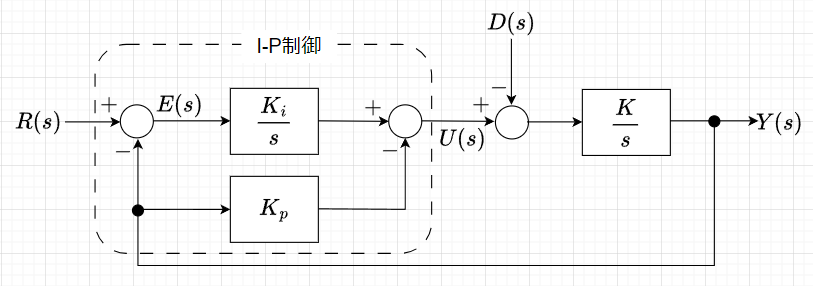
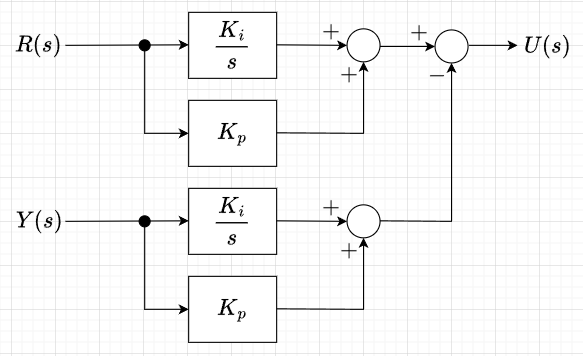
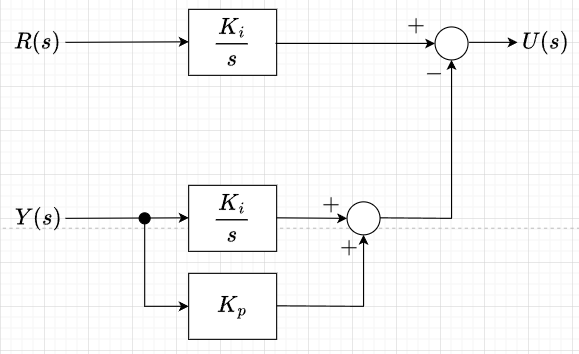
ここで、(1)式を変形すると、$$U(s)=(R(s)-Y(s))\left(\frac{K_i}{s} + K_p\right) \\=R(s)\left( \frac{K_i}{s} + K_p\right) - Y(s)\left( \frac{K_i}{s} + K_p\right) $$ となる。これをブロック図にすると図3「PI制御器の構造」のように表せる。一方、(2)式を変形すると、$$U(s) = (R(s) - Y(s))\frac{K_i}{s} - Y(s) K_p \\ = R(s) \frac{K_i}{s} - Y(s) \left(\frac{K_i}{s} + K_p\right)$$となる。これをブロック図にすると図4「I-P制御器の構造」のように表せる。
図3と図4を比べると、図3(PI制御)では、目標値\(R(s)\)に比例要素と積分要素が作用しており、図4(I-P制御)では、目標値\(R(s)\)に積分要素だけ作用している。つまり、I-P制御の場合、目標値\(R(s)\)の変化を緩やかにするように働くことになる。一方、出力\(Y(s)\)のフィードバックに関しては、PI制御でもI-P制御でも変わらない。すなわち、外乱\(D(s)\)や制御対象のバラツキなどによる変動の影響を抑制する働きは、PI制御もI-P制御も同等であると言える。
シミュレーションによる動作比較
Xcos(Scilabの時間領域シミュレーションツール)を使って、PI制御とI-P制御の時間応答特性を比較する。
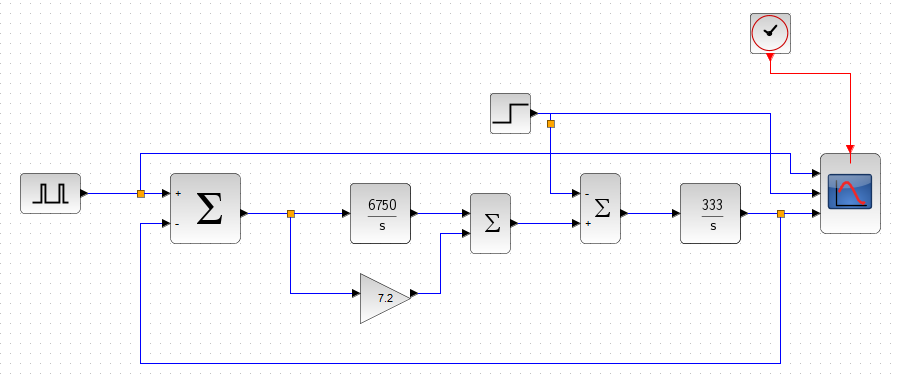
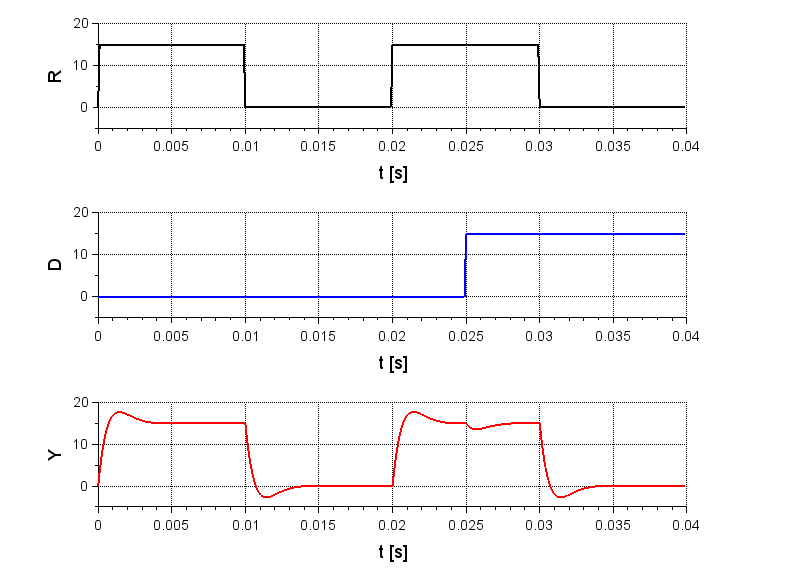
図5は「PI制御シミュレーション」である。制御対象は、パワーエレクトロニクスであるモータ駆動回路(モータのコイル、すなわち、インダクタを駆動する電気回路)を想定しており、制御対象の伝達関数は\(\frac{333}{s}\)で、積分特性である。図6が「PI制御シミュレーション結果」で、目標値\(R\)は周期的な矩形波で、外乱\(D\)はステップ状に変化するとする。出力\(Y\)は、目標値\(R\)に追従するように変化するが、若干のオーバーシュート(及びアンダーシュート)が見られる。また、ステップ状の外乱\(D\)が入ったとき(25 [ms]の部分)、出力\(Y\)が乱れるが、2 [ms]程度で抑圧できている。
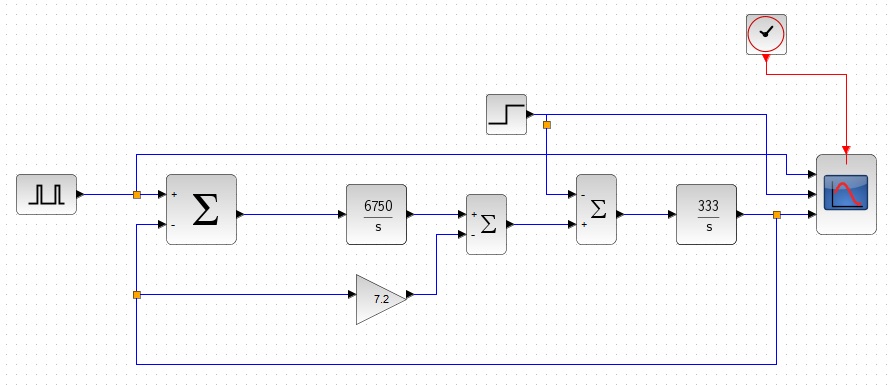
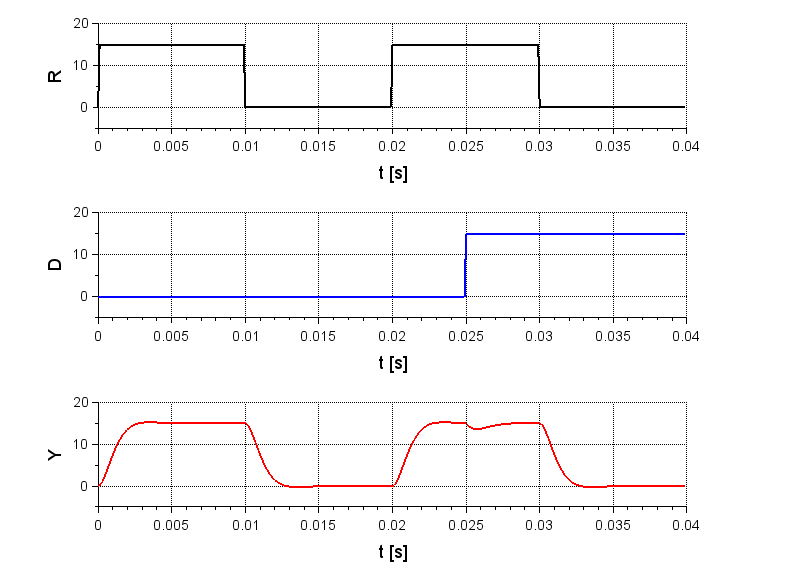
図7は同じ制御対象で、\(K_i , \;\;K_p\)とも同じ値にしたときの「I-P制御シミュレーション」である。出力\(Y\)は、PI制御の場合と比較して滑らかに目標値\(R\)に追従しており、オーバーシュート(及びアンダーシュート)がほとんど無い。ステップ状の外乱\(D\)が入ったときの応答はPI制御の場合と同様である。つまり、目標値に対する応答は改善し、外乱に対する応答は劣化しないことが分かる。
以上のように、I-P制御はPI制御と同じ制御要素(比例制御、積分制御)でフィードバックの構成の若干の変更で、目標値応答を改善し、外乱抑圧特性を変えないことができる。
ただし、実装においては各要素における飽和特性など(特に積分要素の飽和など)を十分に検討する必要がある。