
20. システムの状態方程式(演習)
システムの特性を以下の状態方程式(式(1))、出力方程式(式(2))で表現する。$$\dot{x}(t) = A x(t) + B u(t) \;\;\cdots \cdots (1)\\y(t) = C x(t) \;\;\cdots \cdots (2)$$ \(x(t)\):状態変数、\(u(t)\):入力変数、\(y(t)\):出力変数、\(A\):システム行列、\(B\):入力行列、\(C\):出力行列
※状態方程式の詳細に関しては、3. 動的システムの状態方程式表現 を参照願います。
熱システム
図1に示す電気炉の特性を表す数式モデルを求める。
\(\theta\):炉内温度(外気温との差)[℃]
\(q_i\):単位時間の加熱量 [kcal / s]
\(C\):熱容量 [kcal / ℃]
\(D\):単位時間の熱の放散係数 [kcal / ℃ / s]
\(q_o\):単位時間の熱の放散量 [kcal / s]
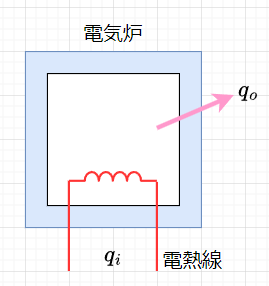
電熱線の単位時間の発生熱量を\(q_i\)、単位時間の熱の放散量を\(q_o\)とするとき、この差が電気炉内の時間的温度変化を与える。微小時間\(\Delta t\)での温度変化を\(\Delta \theta\)とするとき、$$C \Delta \theta = (q_i - q_o) \Delta t$$が成立する。この式の極限を考えると、$$C \frac{d \theta}{dt} = q_i - q_o $$となる。また、放散熱量は、$$q_o = D \theta$$なので、状態方程式は、\(q_i\)を入力変数、\(\theta\)を状態変数として、$$\frac{d \theta}{dt} = -\frac{D}{C} \theta +\frac{1}{C} q_i$$ である。また、炉内の温度を出力として、出力方程式は、$$y = \theta$$となる。
電気回路システム
図2に示す電気回路で、\(v_i\)を入力電圧としたときのコンデンサの端子電圧\(v_o\)の変化を表す数式モデルを求める。
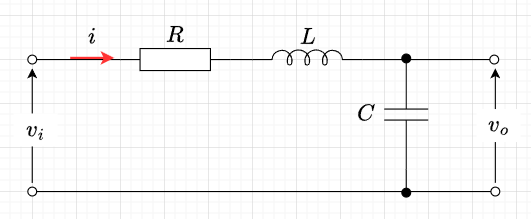
電流\(i\)と入力電圧\(v_i\)の関係は、$$v_i = R i + L \frac{d i}{dt} + \frac{1}{C} \int i dt$$と表せる。これを電荷\(q\)と電圧\(v_i\)の関係式に書き換えると、$$L \frac{d^2 q}{dt^2} + R \frac{d q}{dt} + \frac{1}{C} q = v_i \;\; \cdots\cdots (3)$$となる。なお、\(i = \frac{dq}{dt}, \;\;\; v_o = \frac{1}{C}q\)である。ここで、電荷\(q\)を状態変数\(x_1\)とおく。さらに、$$x_1 = q, \;\;\;\;\;\; \frac{d q}{dt} = \frac{d x_1}{dt } = x_2$$と状態変数\(x_2\)をおくと、式(3)は、$$L \frac{d x_2}{dt} + R x_2 + \frac{1}{C} x_1 = v_i$$であり、$$v_o = \frac{1}{C} x_1$$となる。以上の式をまとめると、$$\frac{d}{dt} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ - \frac{1}{LC} & -\frac{R}{L} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{L} \end{bmatrix} u \\ y = \begin{bmatrix} \frac{1}{C} & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} $$となる。ここで、\(u\):入力変数、\(y\):出力変数である。
機械システム
図3に示す機械システムで、バネ\(K\)とダンパ\(D\)で繋がれた台車\(M\)の動きについて、外力\(f\)を図の方向に加えたときの平衡点からのずれ\(x\)を表す数式モデルを求める。
\(K\):バネの弾性係数、\(D\):ダンパの粘性摩擦係数、\(M\):台車の質量 とする。
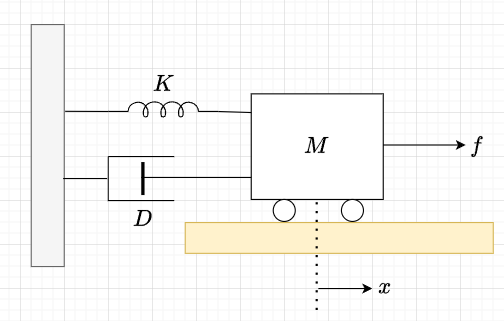
台車と床の間の摩擦をゼロとすると、力の釣り合いの式は、$$M\frac{d^2 x}{dt^2} + D \frac{d x}{dt} + K x = f\;\;\cdots \cdots(4)$$となる。ここで、状態変数を\(x_1 = x , \;\;\;\;\; x_2 = \frac{x_1}{dt}\)とおくと、式(4)は、$$M\frac{d x_2}{dt} + D x_2 + K x_1 = f$$となる。外力\(f\)を入力変数\(u\)、位置\(x\)を出力変数\(y\)として、まとめると、$$\frac{d}{dt}\begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ - \frac{K}{M} & - \frac{D}{M} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{M} \end{bmatrix} u \\ y = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} $$となる。
振り子運動
図4に示す振り子がある。鉛直線からの振れ角\(\theta\)の動きを表す状態方程式を求める。\(m\):重りの質量、\(l\):ロープ長とする。
回転運動を表す運動方程式は、$$J \frac{d^2 \theta}{dt^2} = T$$である。\(J\)は慣性モーメント、\(T\)はトルクである。重力\(mg\)の支点O周りの時計方向のトルクは、\(l m g \sin\theta\)であり、支点O周りの慣性モーメントは、\(m l^2\)である。
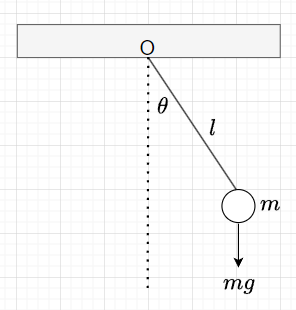
よって、運動方程式は、$$m l^2 \frac{d^2 \theta}{dt^2} = - l m g \sin \theta \\ \frac{d^2 \theta}{dt^2} = - \frac{g}{l} \sin \theta\;\;\cdots \cdots (5)$$となる。この式は、三角関数が含まれているため非線形微分方程式である。しかし、振れ角\(\theta\)が小さい場合には、\(\sin \theta = \theta\)とできるので、式(5)は、$$\frac{d^2 \theta}{dt^2} = - \frac{g}{l} \theta$$となる。ここで、\(x_1 = \theta , \;\; x_2 = \frac{d x_1}{dt}\)とおくと、$$\frac{d x_2}{dt} = -\frac{g}{l} x_1$$なので、振り子運動の状態方程式は、$$\frac{d}{dt} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ -\frac{g}{l} & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix}$$となる。但し、\(\theta\)は小さく、\(\sin \theta = \theta\)と見なせる範囲とする。
倒立振子の運動
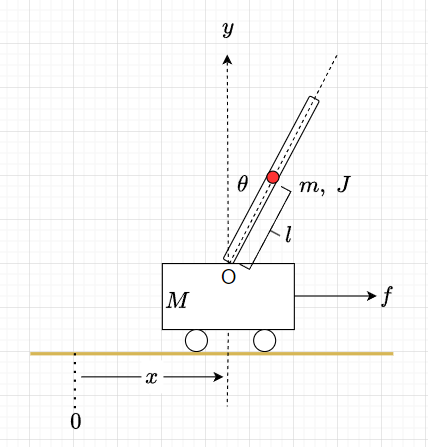
図5に示す倒立振子(台車上に支点Oで支持された振子の倒立状態を維持する機構)の運動の状態方程式を求める。
\(M\):台車の質量、\(x\):台車の位置、\(f\):台車の駆動力、\(m\):振子の質量、\(J\):振子の慣性モーメント、\(l\):振子の支点Oから重心(赤点)までの長さ、とする。
鉛直上向きの\(y\)軸をとる。振子の重心(赤点)(\(x_G, \; y_G\))は、$$x_G = x + l \sin \theta, \;\;\;\; y_G = l \cos \theta$$また、$$\dot{x}_G = \dot{x} + l \dot{\theta} \cos \theta, \;\;\;\; \dot{y}_G = - l \dot{\theta} \sin \theta$$である。
よって、振子の並進運動のエネルギーは、$$\frac{1}{2} m v^2 = \frac{1}{2} m(\dot{x}^2_G + \dot{y}^2_G) = \frac{1}{2} m \left( \dot{x}^2 + 2 \dot{x} l \dot{\theta} \cos \theta + l^2 \dot{\theta}^2 \right)$$ である。これに、振子の回転運動と台車の運動エネルギーを加えた運動エネルギーの総和\(T\)は、$$T = \frac{1}{2} J \dot{\theta}^2 + \frac{1}{2} M \dot{x}^2 + \frac{1}{2} m \left( \dot{x}^2 + 2 \dot{x} l \dot{\theta} \cos \theta + l^2 \dot{\theta}^2 \right)$$となる。また、ポテンシャルエネルギーは、$$U = m g l \cos \theta$$である。従って、ラグラジアン\(L\)は、$$L = T - U = \frac{1}{2}(M + m)\dot{x}^2 + m \dot{x} l \dot{\theta} \cos \theta + \frac{1}{2}(J + m l^2)\dot{\theta}^2 - m g l \cos \theta$$となる。ラグランジュの運動方程式、$$\frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}}\right) - \frac{\partial L}{\partial q} = 0$$より、\(\theta\)を一般化座標として、$$\frac{\partial L}{\partial \theta} = - m l \dot{x} \dot{\theta} \sin \theta + m g l \sin \theta \\ \frac{d}{dt} \left(\frac{\partial L}{\partial \dot{\theta}}\right) = \frac{d}{dt} \left\{ m l \dot{x} \cos \theta + ( J + m l^2) \dot{\theta} \right\} = m l \ddot{x} \cos \theta - m l \dot{x} \dot{\theta} \sin \theta + (J + m l^2)\ddot{\theta}$$を得る。よって、ラグランジュの運動方程式は、$$m l \ddot{x} \cos \theta + (J + m l^2)\ddot{\theta} - m g l \sin \theta =0 \;\; \cdots \cdots (6)$$である。同様に、\(x\)を一般化座標とすると、$$\frac{\partial L}{\partial x} = 0 \\ \frac{d}{dt} \left(\frac{\partial L}{\partial \dot{x}}\right) = \frac{d}{dt} \left\{ (M + m)\dot{x} + m l \dot{\theta} \cos \theta \right\} = (M + m)\ddot{x} + m l \ddot{\theta} \cos \theta - m l \dot{\theta}^2 \sin \theta$$を得る。この場合は、外力\(f\)があるので、ラグランジュの運動方程式は、$$(M + m)\ddot{x} + m l \ddot{\theta} \cos \theta - m l \dot{\theta}^2 \sin \theta = f \;\; \cdots \cdots (7)$$である。式(6)、式(7)において、傾き角\(\theta\)が小さいとして線形化すると、$$m l \ddot{x} + (J + m l^2)\ddot{\theta} - m g l \theta = 0 \\ (M + m) \ddot{x} + m l \ddot{\theta} = f$$となる。この連立微分方程式を\(\ddot{x} ,\; \ddot{\theta}\)について解いて、状態方程式の形式にまとめると、$$ \frac{d}{dt} \begin{bmatrix} x \\ \theta \\ \dot{x} \\ \dot{\theta} \end{bmatrix} = \begin{bmatrix} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & -\frac{m^2 l^2 g}{A} & 0 & 0 \\ 0 & \frac{(M + m) m g l}{A} & 0 & 0 \end{bmatrix} \begin{bmatrix} x \\ \theta \\ \dot{x} \\ \dot{\theta} \end{bmatrix} + \begin{bmatrix} 0 \\ 0 \\ \frac{J + m l^2}{A} \\ - \frac{m l}{A} \end{bmatrix} f $$ここで、\(A = (M + m)(J + m l^2) - m^2 l^2\)である。
※倒立振子実験装置については、https://www.pid-control.com/products/seesaw/index.htmlを参照願います。
ラグランジュ法
ラグランジュ法は、等式制約条件のもとで関数の極値を求めるための数学的な方法である。ラグランジュの運動方程式において、ラグランジアン\(L\)は、\(L = T - U\)と書ける。 \(T\) :運動エネルギー、\(U\):ポテンシャルエネルギー。一般化座標を\(q\)と書くと、\(L\)は\(q\)と\(\dot{q}\)の関数で、\(L(q,\;\dot{q})\)である。一般化座標を\(q\)として、自由度が1でラグランジアンが\(L(q,\;\dot{q})\)の系に対するラグランジュの運動方程式は、$$\frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}}\right) - \frac{\partial L}{\partial q} = 0$$である。
【例】ラグランジュ法を用いて、ニュートンの運動方程式を導出する。
質点 \(m\) が摩擦なしに動く系とする。運動エネルギー は\(T=\frac{1}{2} m v^2\)、ポテンシャルエネルギーは\(U = mgh\)となり、制約条件は無しとする。
ラグランジュ関数は、$$L(x, y, \dot{x}, \dot{y}) = T - U = \frac{1}{2}m(\dot{x}^2 + \dot{y}^2) - mgh$$である。ラグランジュの運動方程式を解くと、以下の運動方程式が得られる。$$F_x = ma_x, \quad F_y = ma_y$$
ラグランジュ法の利点は、 複雑な系でも比較的簡潔に運動方程式を導出できる、 慣性系だけでなく非慣性系でも運動方程式を導出できる、ことである。
