
15. 状態観測器に基づいた制御系
状態観測器に基づいた制御系は、制御対象の状態量を観測することで、操作量を生成する制御システムである。この制御系では、状態フィードバック制御を基本として、制御対象の状態変数をフィードバックすることで、制御対象の安定化と望ましい応答を実現することを目指す。
状態観測器は、制御対象の入力と出力を観測して、制御対象内部の状態変数を推定する。これにより、操作量を生成するための情報を得ることができる。状態観測器は、制御対象の状態方程式と出力方程式を使用して設計する。
状態フィードバック制御では、状態観測器によって推定された状態変数を使用して、操作量を決定する。操作量は、制御対象への入力で、制御対象の出力は、状態観測器によって観測され、フィードバックされることになる。
状態フィードバック制御は、制御対象の内部状態を制御することができるため、外乱やノイズの影響に強く、高速で正確な制御が可能である。ただし、状態観測器には計算コストがかかるため、高速なシステムでは実現が難しい場合がある。
状態方程式:$$x(k+1) = Ax(k) + bu(k)$$ 出力方程式:$$y(k) =c x(k)$$ とする。
状態フィードバック
全ての状態変数を測定してフィードバックをかけることで、安定化、極配置を実現する。$$u(k) = -f x(k) + v(k)$$ $$x(k +1) = (A - bf)x(k) + b v(k) \\ y(k) = cx(k)$$ \(v(k)\):外部入力
\(f = \begin{bmatrix} f_1 & f_2 & \cdots & f_n \end{bmatrix}\):状態フィードバックゲイン
\((A , b)\)が可制御であれば、 \((A - bf)\)の極が任意に配置できる。
状態観測器(オブザーバ)
測定可能な入力\(u(k)\)と出力\(y(k)\)から状態変数\(x(k)\)を推定する。$$\hat{x}(k+1) = A\hat{x}(k) + b u(k) +g\left(y(k) - \hat{y}(k) \right) \\ \hat{y}(k) = c \hat{x}(k) \\e(k+1) = (A - gc)e(k)$$ \(g = \begin{bmatrix} g_1 & g_2 & \cdots & g_n \end{bmatrix}\):観測器ゲイン
\((A , c)\)が可観測であれば、 \((A - gc)\)の極が任意に配置できる。
状態観測器を使った状態フィードバックシステム
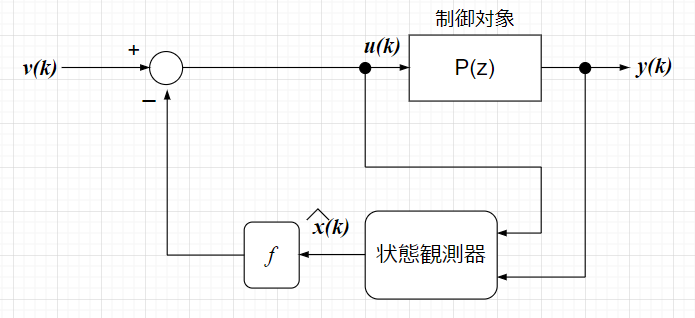
状態フィードバックの操作量 \(u(k)=-f x(k)+v(k)\)において、状態変数\(x(k)\)が観測できない場合、その状態の推定値 \(\hat{x} (k)\)でフィードバックをかけるとする。すなわち、操作量を\(u(k)=-f \hat{x} (k)+v(k)\) とする。
このとき、閉ループ系は、$$\begin{bmatrix} x( k+1) \\ \hat{x}(k+1) \end{bmatrix} = \begin{bmatrix} A & -b f \\ gc & A - bf -gc \end{bmatrix} \begin{bmatrix} x(k) \\ \hat{x}(k) \end{bmatrix} + \begin{bmatrix} b \\ b \end{bmatrix} v(k) \\ y(k) = \begin{bmatrix} c & 0 \end{bmatrix} \begin{bmatrix} x(k) \\ \hat{x}(k) \end{bmatrix} $$となる。
ここで、$$\begin{bmatrix} x(k) \\ e(k) \end{bmatrix} = \begin{bmatrix} I & 0 \\ I & -I \end{bmatrix} \begin{bmatrix} x(k) \\ \hat{x}(k) \end{bmatrix}$$とおくと、$$\begin{bmatrix} x(k+1) \\ e(k+1) \end{bmatrix} = \begin{bmatrix} A - bf & bf \\ 0 & A - gc \end{bmatrix} \begin{bmatrix} x(k) \\ e(k) \end{bmatrix} + \begin{bmatrix} b \\ 0 \end{bmatrix} v(k) \\ y(k) = \begin{bmatrix} c & 0 \end{bmatrix} \begin{bmatrix} x(k) \\ e(k) \end{bmatrix}$$となる。
特性方程式は、$$\left|zI -\begin{bmatrix} A - bf & bf \\ 0 & A - gc \end{bmatrix}\right| = 0$$なので、 $$|zI - (A - bf)|\cdot |zI -(A -gc)| = 0$$となる。これより、\((A-bf)\)の固有値と\((A-gc)\)の固有値を個別に配置できることがわかる。
分離定理
状態フィードバックゲイン\(f\) と状態観測のゲイン\(g\)を各々設計することで、閉ループ制御系の(制御則)極と状態観測器の極を別々に配置することができる。
※一般に、状態観測器の極は、状態フィードバック制御の極より、速く収束するように選ぶ(推定状態量が確定しないと状態フィードバック制御ができないため)。
状態観測器を使った状態フィードバックシステムの伝達関数
$$\begin{bmatrix} x(k+1) \\ e(k+1) \end{bmatrix} = \begin{bmatrix} A - bf & bf \\ 0 & A - gc \end{bmatrix} \begin{bmatrix} x(k) \\ e(k) \end{bmatrix} + \begin{bmatrix} b \\ 0 \end{bmatrix} v(k) \\ y(k) = \begin{bmatrix} c & 0 \end{bmatrix} \begin{bmatrix} x(k) \\ e(k) \end{bmatrix}$$において、Z変換すると、$$zI \begin{bmatrix} x(z) \\ e(z) \end{bmatrix} = \begin{bmatrix} A - bf & bf \\ 0 & A - gc \end{bmatrix} \begin{bmatrix} x(z) \\ e(z) \end{bmatrix} + \begin{bmatrix} b \\ 0 \end{bmatrix} v(z) \\ y(z) = \begin{bmatrix} c & 0 \end{bmatrix} \begin{bmatrix} x(z) \\ e(z) \end{bmatrix}$$ となる。よって、$$\begin{bmatrix} x(z) \\ e(z) \end{bmatrix} =\left\{ zI - \begin{bmatrix} A - bf & bf \\ 0 & A - gc \end{bmatrix} \right\}^{-1} \begin{bmatrix} b \\ 0 \end{bmatrix} v(z)$$ さらに、$$y(z) = \begin{bmatrix} c & 0\end{bmatrix} \begin{bmatrix} zI - (A-bf) & -bf \\ 0 & zI - (A-gc) \end{bmatrix} ^{-1} \begin{bmatrix} b \\ 0 \end{bmatrix} v(z) \\ = c\left[ zI - (A- bf) \right]^{-1} b v(z)$$ よって、$$G(z) = \frac{y(z)}{v(z)} = c\left[ zI - (A- bf) \right]^{-1} b$$となる。
すなわち、伝達関数は状態観測器に依存しないことがわかる。
ブロック行列の逆行列
ブロック行列を$$T= \begin{bmatrix} A & B \\ C & D \end{bmatrix}$$とすると、\(A\)と\(S=D - CA^{-1}B\)が正則なとき、 $$T^{-1} = \begin{bmatrix} A^{-1}+A^{-1}BS^{-1}CA^{-1} & -A^{-1}BS^{-1} \\ -S^{-1}CA^{-1} & S^{-1} \end{bmatrix}$$となる。
