
30. インピーダンス制御
インピーダンス制御(Impedance Control)は、ロボットの先端(エンドエフェクタ)と環境との間の「動的な関係(力と運動の関係)」を操るための制御手法である。これまでの「位置制御」や「力制御」とは異なり、ロボッ […]
28. 外乱オブザーバ
外乱オブザーバ(Disturbance Observer: DOB)は、モータ制御などの精密なモーションコントロールにおいて、負荷トルクの変動や摩擦、モデルの不確かさを「外乱」として一括して推定し、その「外乱」打ち消すた […]
27. PIDと状態フィードバック
PID制御と「状態観測器(オブザーバ)を用いた状態フィードバック」は、一見すると異なる手法に見えるが、制御の本質(過去・現在・未来の情報をどう使うか)において共通点がある。特に、2次系(位置と速度を扱うシステムなど)にお […]
19-1. リッカチ代数方程式
最適制御、特に線形二次レギュレータ(LQR)の問題において、無限時間評価関数を最小化する際に現れるのがリッカチ代数方程式(Algebraic Riccati Equation, ARE)である。ここでは、リッカチ代数方程 […]
12-1. 可制御正準形への変換(演習)
※可制御正準形への変換に関しては、12. 可制御正準形を参照。 対象とする状態方程式と出力方程式は$$\dot{x}(t) = Ax(t) + bu(t) \\ y(t) = Cx(t) \quad \cdots (1) […]
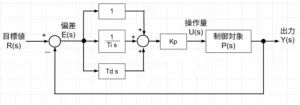
26. 積分型最適レギュレータ
目標値がステップ関数であるサーボシステムの構成として、積分型最適レギュレータがある。これは、入力\(u(t)\) はできるだけ緩やかに変化させながら制御対象の出力\(y(t)\) と一定目標値\(r(t)\) との偏差\ […]
25. 最適レギュレータ
現代制御理論における最適レギュレータは、制御対象の状態を評価関数と呼ばれる指標に基づいて最適な状態に導く制御システムで、状態フィードバックを用いて制御し、評価関数の最小値となるようなフィードバックゲインを決定することで実 […]
24. 極配置法(演習)
式(1)で表記する1入力\(n\)次元定係数線形システムを制御対象とする。$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = c x(t) \;\;\cdots \cdots (1)$$式( […]
23. 可観測性(演習)
※可観測性の解説は、11. 可観測性 、9. 対角正準形 を参照願います。 システムを$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = cx(t) \;\; \cdots \cdots ( […]
22. 可制御性(演習)
※可制御性の解説は、10. 可制御性、12. 可制御正準系 を参照願います。※固有値、固有ベクトルの計算手順の詳細については、固有値と固有ベクトルの計算 を参照願います。 座標変換 1入力1出力\(n\)次元システム $ […]
21. システムの応答(演習)
制御対象を入力\(m\)、出力\(l\)の\(n\)次元の線形定係数システムとする。$$\dot{x}(t) = A x(t) + B u(t) \;\cdots \cdots (1) \\ y(t) = C x(t)\ […]
20. システムの状態方程式(演習)
システムの特性を以下の状態方程式(式(1))、出力方程式(式(2))で表現する。$$\dot{x}(t) = A x(t) + B u(t) \;\;\cdots \cdots (1)\\y(t) = C x(t) \; […]
19. 最適フィードバック制御
最適フィードバック制御は、制御系の性能を評価する関数(評価関数)を設定し、その関数値を最小化するようにフィードバックゲインを決定する制御方法である。評価関数は、制御系の応答の振る舞いを反映した関数で、応答の速度、精度、安 […]
18. サーボシステムの設計
レギュレータは、状態変数に平衡点0からずれた初期値があったとき、状態変数を0に戻すための制御システムであった。サーボシステムは、目標値に追従する出力を持つシステムである。現代制御理論におけるサーボシステムの設計は、システ […]
17. オブザーバ併合型状態フィードバック
オブザーバ併合型状態フィードバック制御システムは、オブザーバと状態フィードバックを組み合わせた制御システムである。オブザーバは、直接観測できない状態変数を推定するために使用され、状態フィードバックは、推定された状態変数を […]
16. オブザーバの設計
オブザーバの設計では、オブザーバの極配置を実現するためのオブザーバゲインを決定することが主要な問題となる。オブザーバの極は、オブザーバが推定するシステム内部の状態量が収束する速度を決定するためのパラメータであり、極が適切 […]
15. オブザーバの構造
状態フィードバックでは、基本的には全ての状態変数が直接観測可能と仮定しているが、実際にはそのような場合は多くない。このときには、制御入力と測定出力から状態変数を再現すればよい。このような仕組みをオブザーバ、あるいは、状態 […]
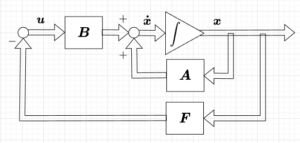
14. 状態フィードバック
状態フィードバック(state feedback)とは、制御対象の状態変数を測定して、その情報を元に制御入力を決定する方法である。制御対象の状態変数とは、制御対象の内部状態のことであり、その状態変数を観測することで、制御 […]
13. モード展開と伝達関数行列
1入力1出力(SISO)システムの対角正準形について、9. 対角正準形で述べたが、多入力多出力(MIMO)システムについても同様な変換が可能である。 MIMOシステムを対角変換したとき、$$\boldsymbol{\ti […]