
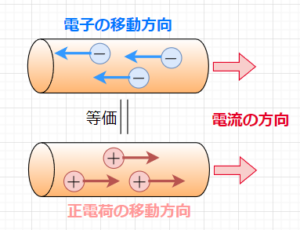
5. 電流、導体、誘電体
電流とは、電気が導体などの経路を通って流れる様子を指す。具体的には、電荷を帯びた粒子が連続的に動く現象である。電流の大きさは、1秒間にどれだけの電荷が移動するかで決まる。電流の単位は\([A]\)で、\(1\;[s]\) […]
4. 電位、電圧(電位差)
電位とは、ある地点における電荷の持つエネルギーのことを指す。電位は、基準点における電位を0と定義し、その基準点からの距離と電荷によって決まる。電位の単位はボルト\( [V]\)であり、\(1\;[V]\)は\(1\;[C […]
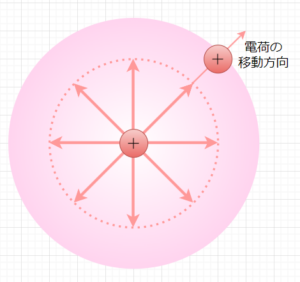
3. 電気力線と電束、ガウスの定理
電界におけるガウスの定理は、電荷と電場の関係を表す重要な法則である。この定理は、「閉曲面を貫く電気力線の総量は、その閉曲面で囲まれた電荷の総量に比例する」という内容を表している。ガウスの定理は、電荷と電場がどのように関係 […]
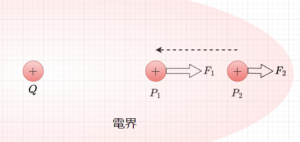
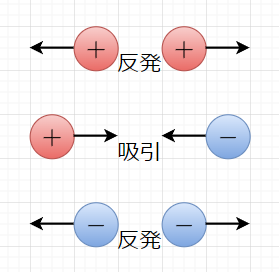
2. 電界と電界の強さ
電界(電場)とは、電荷に力を及ぼす空間の性質の一つである。電荷の周りには電界が存在し、電荷に力を与える。電界は、ベクトル量であり、大きさと方向を持つ。電界の大きさは、その点における単位電荷が受ける力と、その電荷の電気量の […]
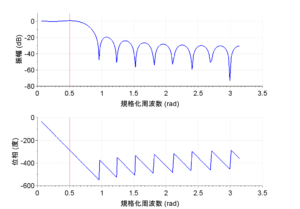
13. FIRフィルタの設計
FIRフィルタの設計では、フーリエ級数展開法で求めたインパルス応答に窓関数を掛ける窓関数法が代表的である。窓関数法によるフィルタの設計手順は、以下である。1)仕様決定:・フィルタの種類(LPF、HPF、BPF、BRFなど […]
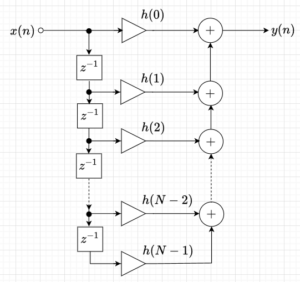
12. FIRディジタルフィルタ
ディジタルフィルタの構成 ディジタル信号処理の分野で、ディジタルフィルタは基本的で重要な技術で、様々な領域で活用されている。ディジタルフィルタは、特定周波数範囲の信号の伝送や除去などアナログフィルタと同じ目的で使用される […]
24. 極配置法(演習)
式(1)で表記する1入力\(n\)次元定係数線形システムを制御対象とする。$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = c x(t) \;\;\cdots \cdots (1)$$式( […]
23. 可観測性(演習)
※可観測性の解説は、11. 可観測性 、9. 対角正準形 を参照願います。 システムを$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = cx(t) \;\; \cdots \cdots ( […]
22. 可制御性(演習)
※可制御性の解説は、10. 可制御性、12. 可制御正準系 を参照願います。※固有値、固有ベクトルの計算手順の詳細については、固有値と固有ベクトルの計算 を参照願います。 座標変換 1入力1出力\(n\)次元システム $ […]
21. システムの応答(演習)
制御対象を入力\(m\)、出力\(l\)の\(n\)次元の線形定係数システムとする。$$\dot{x}(t) = A x(t) + B u(t) \;\cdots \cdots (1) \\ y(t) = C x(t)\ […]
20. システムの状態方程式(演習)
システムの特性を以下の状態方程式(式(1))、出力方程式(式(2))で表現する。$$\dot{x}(t) = A x(t) + B u(t) \;\;\cdots \cdots (1)\\y(t) = C x(t) \; […]
20. 抵抗・インピーダンスの測定(2)
インピーダンスを精度よく測定するために重要な要素は、測定条件の最適化である。インピーダンス測定器(LCRメータやインピーダンスアナライザなど)を使用する際に必要となる基本的な設定条件をまとめる。 (1) 周波数:最も基本 […]
19. 抵抗・インピーダンスの測定(1)
インピーダンスは、抵抗、キャパシタ(コンデンサ)、インダクタ(コイル)などの電気的性質を複素数で表したものである。インピーダンスの測定には、以下の2つの方法がある。1.直流法:オームの法則に基づいてインピーダンスを測定す […]
14-3. チェビシェフフィルタ
チェビシェフフィルタは、フィルタの一種で、バターワースフィルタに比べてロールオフ(フィルタの帯域の端における通過特性の変化の急峻さ)が急勾配で、通過帯域にリップルがある場合(第一種)と阻止帯域にリップルがある場合(第二種 […]
14-2. ベッセルフィルタ
ベッセルフィルタは、群遅延が最大限平坦になるようにしたアナログフィルタである。位相特性が線形になるため、方形波などの波形を入力しても、歪みの少ない出力波形を得ることができる。※群遅延:周波数によって信号の伝搬時間が変わる […]
14-1. バタワースフィルタ
バターワースフィルタは、通過帯域における周波数特性が最大限平坦になるように設計されたアナログフィルタの一種である。リップルと呼ばれる通過帯域におけるゲインの変動がなく、減衰特性は周波数の平方根に比例する。バタワースフィル […]