
30. インピーダンス制御
インピーダンス制御(Impedance Control)は、ロボットの先端(エンドエフェクタ)と環境との間の「動的な関係(力と運動の関係)」を操るための制御手法である。これまでの「位置制御」や「力制御」とは異なり、ロボットに「仮想的なバネ・マス・ダンパ系(機械インピーダンス)」の性質を持たせることが最大の特徴となっている。ロボットやメカトロ系が「どれくらい柔らかく/硬く振る舞うか」を制御する手法といえ、人と接触するロボットや力制御の中核技術となっている。
インピーダンス制御は、機械システムのインピーダンスパラメータ(慣性、粘性、剛性パラメータで、それぞれ力と加速度、速度、変位の比に対応)を目標値に保つ制御を意味し、アクチュエータで駆動される機構が対象に作用を及ぼす際、対象に加わる変位、速度、加速度を検知しつつ、対象との間の相互作用力がある関係を維持するようにアクチュエータの発生力を制御する。
機械インピーダンスの基本
位置制御で動くロボット等は、目標地点の途中経路の障害物に当たっても目標地点に行こうとするため、非常に大きな力を発生させて壊れてしまう可能性がある。インピーダンス制御では、ロボットに式(1)に基づいた挙動を強いることで、あたかも「バネとダンパで支えられた物体」のように振る舞わせる。図1は、1自由度ロボットの概念図である。
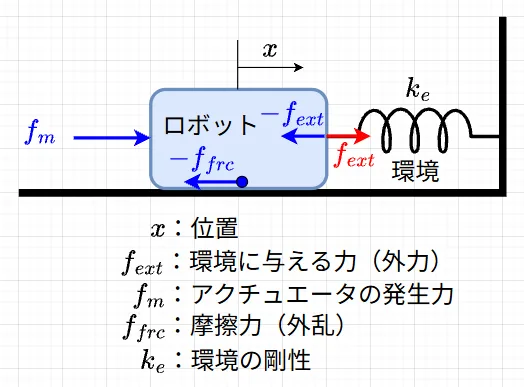
ロボットが環境に与える力を\(f_{ext}\)としたとき、目標軌道\(x_d\)と実際の軌道\(x\)の関係より式(1)が成り立つ。$$M(\ddot{x} - \ddot{x}_d) + D(\dot{x} - \dot{x}_d) + K(x - x_d) = f_{ext} \quad \cdots (1)$$・\(M\)(慣性/質量):重さ(加速のしにくさを決める。)
・\(D\) (粘性/ダンパ):摩擦(動きのしなやかさを決める。)
・\(K\) (剛性/バネ):硬さ(押し返そうとする力を決める。)
これらの値をプログラム上で自由に変えることで、同じロボットのアクチュエータを「硬直的構造体」にしたり、「柔軟構造体」にしたりできる。
式(1)を\(\ddot{x}\)について解くと、式(2)と表せる。$$\ddot{x} = \ddot{x}_d +\frac{1}{M}\left\{f_{ext} - D(\dot{x} - \dot{x}_d) - K(x - x_d)\right\} \quad \cdots (2)$$ この\(\ddot{x}\)は、「あらかじめ決めていた目標加速度」の\(\ddot{x}_d\)と異なり、「外乱を含めて、インピーダンス特性を実現するために今すぐ出すべき修正後の加速度指令」となる。つまり、\(\ddot{x}_d\)が外力が全くないときに、ロボットが本来たどるべき予定の加速度(例:台形加速で動かす、など)であり、\(\ddot{x}\)は、外力\(f_{ext}\)が加わったとき、バネ・マス・ダンパの法則に従って「軌道をどれだけ修正すべきか」を計算した結果の、制御器への最終的な指令値である。
この\(\ddot{x}\)を加速度制御系の加速度指令値とすればよい。
1自由度質点モデルに対するインピーダンス制御のシミュレーション
基本的な 1自由度質点モデル に対してインピーダンス制御を適用するScilabスクリプトを以下に示す。途中で外力(壁への接触など)が発生した際の挙動を確認する。
target_pos(t)でロボットの本来の軌道を定義している。external_force(t, x)関数で、位置が 0.3m を超えたときに押し戻される力を仮定している。impedance_model(t, y)内で、偏差に対して指定した\(M_m, B_m, K_m\)の特性が出るように加速度accを決定している。
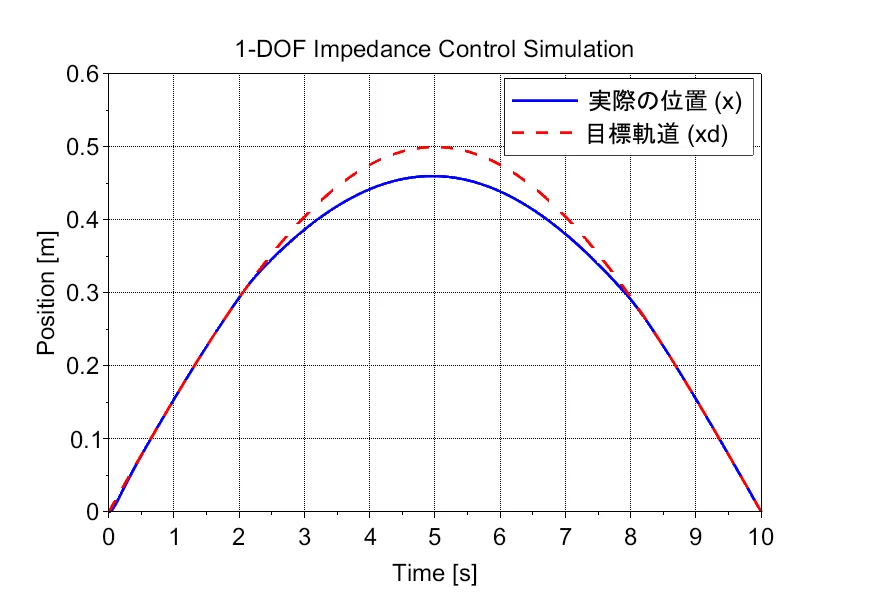
シミュレーション結果では、非接触時(\(x \le 0.3\) m の位置)においてロボットは目標軌道(赤の点線)に追従する。接触時(\(x > 0.3\) m)においては、 壁からの反力\(f_{ext}\)により、目標軌道から押し戻される。この際、剛性\(K_m\)を小さくするとより「柔らかく」なり押し戻される量が大きくなる。剛性\(K_m\)を大きくすると「硬く」なり押し込む様子が確認できる。
インピーダンス制御の本質は、この 「偏差を許容し、その際の力学的関係を設計する」 点にあるといえる。
// インピーダンス制御シミュレーション (1自由度)
clear; clc;
// パラメータ設定
M_m = 2.0; // 質量 [kg]
B_m = 40.0; // 粘性 [Ns/m]
K_m = 200.0; // 剛性 [N/m]
// 目標軌道と外力の設定
function xd = target_pos(t)
xd = 0.5 * sin(2 * %pi * 0.05 * t); // 0.05Hzの正弦波
endfunction
function f_ext = external_force(t, x)
if x > 0.3 then
f_ext = 50.0 * (x - 0.3); // 0.3m以上の地点に柔らかい壁がある想定
else
f_ext = 0;
end
endfunction
// 微分方程式の定義
// y(1): 位置 x, y(2): 速度 v
function dydt = impedance_model(t, y)
x = y(1);
v = y(2);
xd = target_pos(t);
vd = (target_pos(t+0.001) - target_pos(t)) / 0.001; // 近似微分
ad = (target_pos(t+0.001) - 2*target_pos(t) + target_pos(t-0.001)) / 0.001^2;
f_ext = external_force(t, x);
// インピーダンス則に基づく加速度の計算
// M_m*(ad - acc) + B_m*(vd - v) + K_m*(xd - x) = f_ext
acc = ad + (B_m*(vd - v) + K_m*(xd - x) - f_ext) / M_m;
dydt = [v; acc];
endfunction
// シミュレーションの実行
t = 0:0.01:10;
y0 = [0; 0]; // 初期位置0, 初期速度0
sol = ode(y0, 0, t, impedance_model);
// 結果のプロット
clf();
plot(t, sol(1, :), 'b-', "linewidth", 2);
plot(t, target_pos(t), 'r--', "linewidth", 1);
hl = legend(['実際の位置 (x)'; '目標軌道 (xd)']);
xlabel("Time [s]");
ylabel("Position [m]");
title("1-DOF Impedance Control Simulation");
xgrid();
Scilab
