
11. スライディングモード到達則
式(1)のシステムを考える。$$\dot x = A x + B u,\quad \sigma = S x \;\;\; \cdots (1)$$ 超平面 \(\sigma_i\)でのスライディングモードの存在条件は式(2)で与えられる。$$\begin{cases} \dot \sigma_i \gt 0 & \text{if } \sigma_i \lt 0 \\ \dot \sigma_i \lt 0 & \text{if } \sigma_i \gt 0 \end{cases} (i=1,2,\cdots,m) \;\;\; \cdots (2)$$この条件を満足するように、式(3)の到達則を考える。$$\dot \sigma = - Q\text{sgn} (\sigma) - K f(\sigma) \;\;\; \cdots (3) $$ここで、$$Q = \text{diag}[q_1, q_2, \cdots ,q_m] \quad q_i \gt 0 \\ K = \text{diag}[k_1,k_2,\cdots, k_m] \quad k_i \gt 0 \\ \text{sgn}(\sigma) = [\text{sgn}(\sigma_1), \cdots, \text{sgn}(\sigma_m)]^T \\ f(\sigma) = [f_1(\sigma_1), \cdots, f_m(\sigma_m)]^T \\ \sigma_if_i(\sigma_i) \gt 0, \quad \text{if } \sigma_i \neq 0 \quad (i=1,2, \cdots, m)$$である。
式(1)より、\(\dot \sigma = S A x + S B u\)なので、式(3)に代入すると、制御入力は、式(4)となる。$$ u = -(SB)^{-1}\{SA x + Q \text{sgn}(\sigma) + K f(\sigma)\} \;\;\; \cdots (4)$$
以下、式(3)の到達則を基に代表的な到達則を考える。到達則は、スライディング超平面への到達時間、チャタリングの低減、ロバスト性などに影響を与える重要な要素となる。
定常到達則(定速到達則)
到達則を式(5)で表す。$$\dot \sigma = - Q \text{sgn}(\sigma) \;\;\; \cdots (5)$$ここで、\(Q \gt 0\)は到達速度を決定する正の定数、\(\text{sgn}\)は符号関数で、\(\sigma \gt 0\)のとき 1、\(\sigma \lt 0\)のとき −1、\(\sigma =0\)のとき 0(または定義により −1 から 1 の間の任意の値)を取る。従って、状態が定常倍率\(|\dot \sigma_i| = - q_i\)でスライディングモード超平面へ収束する。この到達則は簡単であるが、\(q_i\)の値が小さくなると到達時間も長くなる。また、\(q_i\)の値が大きくなるとチャタリング現象が起きる。
比例到達則(指数到達則)
到達則を式(6)で表す。$$\dot \sigma = -Q \text{sgn}(\sigma) - K \sigma \;\;\; \cdots (6)$$ここで、\(Q \gt 0,\quad K \gt 0\)は正の定数である。式(5)に比例項\(-K \sigma\)が入るために、状態変数\(x\)が任意初期値\(x_0\)からスライディングモード超平面\(\sigma_i\)に到達する時間は、定常到達則より短くなる。この到達時間は、式(7)となる。$$T_i = \frac{1}{k_i} \ln \frac{k_i |\sigma_i| + q_i}{q_i} \;\;\; \cdots (7)$$式(7)より、状態は指数関数的に超平面に収束することがわかる。
\(\sigma\)が大きいときは \(−Q\text{sgn}(\sigma)\) が支配的になり、速い到達が期待できる。\(\sigma\)が小さいときは\(-K\sigma\)が支配的になり、指数的に\(\sigma=0)に収束する。これにより、定速到達則と比較してチャタリングを抑制する効果が期待できる。
加速率到達則(べき乗到達則)
到達則を式(8)で表す。$$\dot \sigma_i = -k_i |\sigma_i|^\alpha \text{sgn}(\sigma_i) \quad 0 \lt \alpha \lt 1 \quad (i=1,2,\cdots, m) \;\;\; \cdots (8)$$ここで、\(k \gt 0\)、\(0 \lt \alpha \lt 1 \)は正の定数である。この到達則の特性は、状態からスライディングモード超平面までの距離が遠いとき状態変数の収束速度が速くなる。一方、スライディングモード超平面の近傍では収束速度が減少する。結果として高速収束と低チャタリングの到達則となる。\(\sigma_i = \sigma_{i0}\)から\(\sigma_i = 0\)まで式(8)を積分すると、到達時間\(T_i\)は、$$T_i = \frac{1}{(1-\alpha)k_i}\sigma_{i0}^{(1-\alpha)}$$になる。また、式(8)の右辺には\(-Q\text{sgn}(\sigma)\)の項が無いので、チャタリングが低減できることが分かる。
到達時間\(T_i\)を求めるのに、初期値\(\sigma_{i0} \gt 0\)とする。このとき、\(t \in [0,T_i)\)の範囲で\(\sigma_i(t) \gt 0\)となる。\(\sigma_i \gt 0\)のとき、\(|\sigma_i| = \sigma_i\)かつ\(\text{sgn}(\sigma_i) = 1\)となる。従って、式(8)は、式(9)と簡略化できる。$$\frac{d \sigma_i}{dt} = - k_i \sigma_i^\alpha \;\;\; \cdots (9)$$変数分離して、両辺を積分する。このとき、時間\(t\)は\(0\)から\(T_i\)まで、\(\sigma_i\)は、初期値\(\sigma_{i0}\)から\(0\)まで変化するので、$$\int_{\sigma_{i0}}^0 \sigma_i^{-\alpha} d \sigma_i = \int_0^{T_i} - k_i dt $$左辺の積分は、$$\left[ \frac{1}{1-\alpha} \sigma_i^{1-\alpha} \right]_{\sigma_{i0}}^{0} = \frac{1}{1-\alpha} (0^{1-\alpha} - \sigma_{i0}^{1-\alpha})$$である。ここで、\(0 \lt \alpha \lt 1\)より、\(1-\alpha \gt 0\)なので、左辺は、$$-\frac{1}{1 - \alpha} \sigma_{i0}^{1 - \alpha}$$となる。右辺の積分は、$$\int_0^{T_i} - k_i dt = -k_i T_i$$である。以上より、$$\frac{1}{1 - \alpha} \sigma_{i0}^{1 - \alpha} = k_i T_i$$なので、\(T_i\)について解くと、$$T_i = \frac{1}{(1-\alpha)k_i}\sigma_{i0}^{(1-\alpha)}$$が求まる。
各到達則の比較シミュレーション
式(10)のシステムに対して、上記の到達則を比較する。$$\dot x = A x + B u, \quad \sigma = S x \\ A = \begin{bmatrix} -2 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & 1 \end{bmatrix},\quad B = \begin{bmatrix} 0 \\ 0 \\ 1 \end{bmatrix} \;\;\; \cdots (10)$$線形な超平面を$$\sigma = x_1 + 2 x_2 + x_3$$ とする。式(4)より制御入力は、$$u = (2 x_1 - x_2 - 2 x_3) - Q \text{sgn} \sigma - K \sigma$$となる。初期値は、\(x_{10} = 0.5, \; x_{20} = 1.0,\; x_{30} = 1.5\)とする。
比例到達則
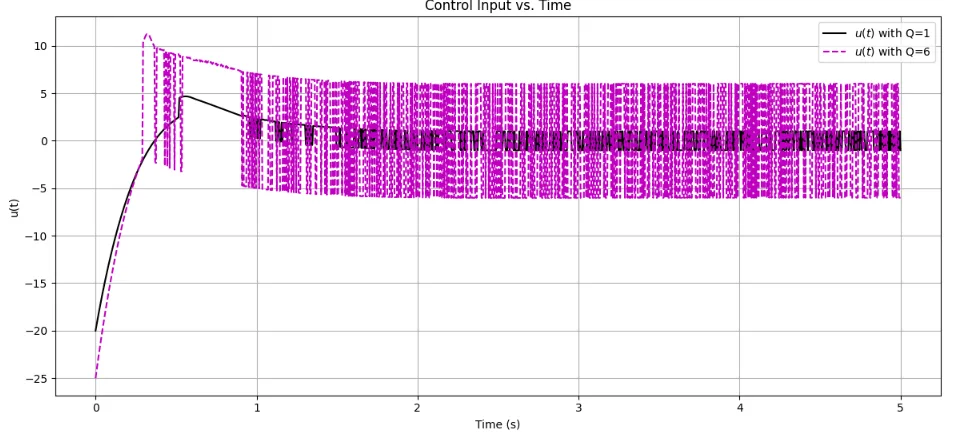
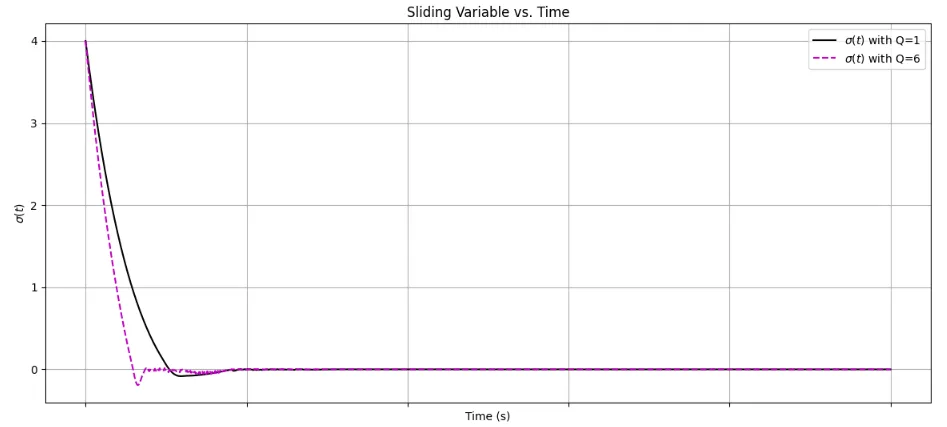
$$\dot \sigma = - Q \text{sgn}(\sigma) - K \sigma \quad (Q=1,6,\; K=4)$$とする。
\(Q\)が大きくなると、状態変数の収束が少し速くなる。しかし、切換関数\(\sigma\)にチャタリングがおき、制御入力\(u\)の変動も大きくなる。

import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
def simulate_sliding_mode(Q_val, K_val, x0, t_span, t_eval):
"""
Simulates the sliding mode control system for given parameters.
Args:
Q_val (float): The Q parameter for the reaching law.
K_val (float): The K parameter for the reaching law.
x0 (list): Initial state [x1, x2, x3].
t_span (tuple): The interval of integration (t_start, t_end).
t_eval (np.array): Times at which to store the computed solution.
Returns:
tuple: A tuple containing the solution object, sigma values, and control input
values.
"""
# System matrices
A = np.array([
[-2, 1, 0],
[0, 0, 1],
[0, 0, 1]
])
B = np.array([[0], [0], [1]])
# Sliding surface vector S, such that sigma = S*x
S = np.array([1, 2, 1])
def system_dynamics(t, x):
"""
Defines the system of differential equations.
dx/dt = A*x + B*u
"""
# Calculate sliding variable sigma
sigma = S @ x
# Calculate control input u based on the provided law
# u = (2*x1 - x2 - 2*x3) - Q*sgn(sigma) - K*sigma
# Note: The term (2*x1 - x2 - 2*x3) is part of the equivalent control
# to cancel out system dynamics on the surface.
u = (2 * x[0] - x[1] - 2 * x[2]) - Q_val * np.sign(sigma) - K_val * sigma
# Calculate state derivatives
# We use B.flatten() to ensure correct dimension for multiplication
x_dot = A @ x + B.flatten() * u
return x_dot
# Solve the ODE system
sol = solve_ivp(system_dynamics, t_span, x0, t_eval=t_eval, dense_output=True)
# Calculate sigma and u for the whole time evolution for plotting
t = sol.t
x_sol = sol.y
sigma_sol = S @ x_sol
u_sol = (2 * x_sol[0, :] - x_sol[1, :] - 2 * x_sol[2, :]) - Q_val * np.sign(sigma_sol) -
K_val * sigma_sol
return sol, sigma_sol, u_sol
def plot_results(results_q1, results_q6):
"""
Plots the simulation results for comparison.
Args:
results_q1 (tuple): Simulation results for Q=1.
results_q6 (tuple): Simulation results for Q=6.
"""
sol_q1, sigma_q1, u_q1 = results_q1
sol_q6, sigma_q6, u_q6 = results_q6
t = sol_q1.t # Time vector is the same for both simulations
# Create figure for plots
fig, axs = plt.subplots(3, 1, figsize=(12, 18), sharex=True)
fig.suptitle('Sliding Mode Control Simulation Comparison', fontsize=16)
# Plot 1: State variables x1, x2, x3
axs[0].plot(t, sol_q1.y[0, :], 'r-', label=r'$x_1(t)$ with Q=1')
axs[0].plot(t, sol_q1.y[1, :], 'g-', label=r'$x_2(t)$ with Q=1')
axs[0].plot(t, sol_q1.y[2, :], 'b-', label=r'$x_3(t)$ with Q=1')
axs[0].plot(t, sol_q6.y[0, :], 'r--', label=r'$x_1(t)$ with Q=6')
axs[0].plot(t, sol_q6.y[1, :], 'g--', label=r'$x_2(t)$ with Q=6')
axs[0].plot(t, sol_q6.y[2, :], 'b--', label=r'$x_3(t)$ with Q=6')
axs[0].set_title('State Variables vs. Time')
axs[0].set_xlabel('Time (s)')
axs[0].set_ylabel('State Values')
axs[0].legend()
axs[0].grid(True)
# Plot 2: Sliding variable sigma
axs[1].plot(t, sigma_q1, 'k-', label=r'$\sigma(t)$ with Q=1')
axs[1].plot(t, sigma_q6, 'm--', label=r'$\sigma(t)$ with Q=6')
axs[1].set_title('Sliding Variable vs. Time')
axs[1].set_xlabel('Time (s)')
axs[1].set_ylabel(r'$\sigma(t)$')
axs[1].legend()
axs[1].grid(True)
# Plot 3: Control input u
axs[2].plot(t, u_q1, 'k-', label=r'$u(t)$ with Q=1')
axs[2].plot(t, u_q6, 'm--', label=r'$u(t)$ with Q=6')
axs[2].set_title('Control Input vs. Time')
axs[2].set_xlabel('Time (s)')
axs[2].set_ylabel('u(t)')
axs[2].legend()
axs[2].grid(True)
plt.tight_layout(rect=[0, 0.03, 1, 0.96])
plt.show()
if __name__ == '__main__':
# --- Simulation Parameters ---
# Initial conditions for x = [x1, x2, x3]
x0 = [0.5, 1.0, 1.5]
# Time span for the simulation
t_span = (0, 5)
# Points in time to evaluate the solution
t_eval = np.linspace(t_span[0], t_span[1], 1000)
# K parameter (constant for both simulations)
K = 4.0
# --- Run Simulations ---
# Case 1: Q = 1
print("Running simulation for Q=1, K=4...")
results_q1 = simulate_sliding_mode(Q_val=1.0, K_val=K, x0=x0, t_span=t_span,
t_eval=t_eval)
# Case 2: Q = 6
print("Running simulation for Q=6, K=4...")
results_q6 = simulate_sliding_mode(Q_val=6.0, K_val=K, x0=x0, t_span=t_span,
t_eval=t_eval)
# --- Plot Results ---
print("Plotting results...")
plot_results(results_q1, results_q6)
print("Done.")
加速率到達則
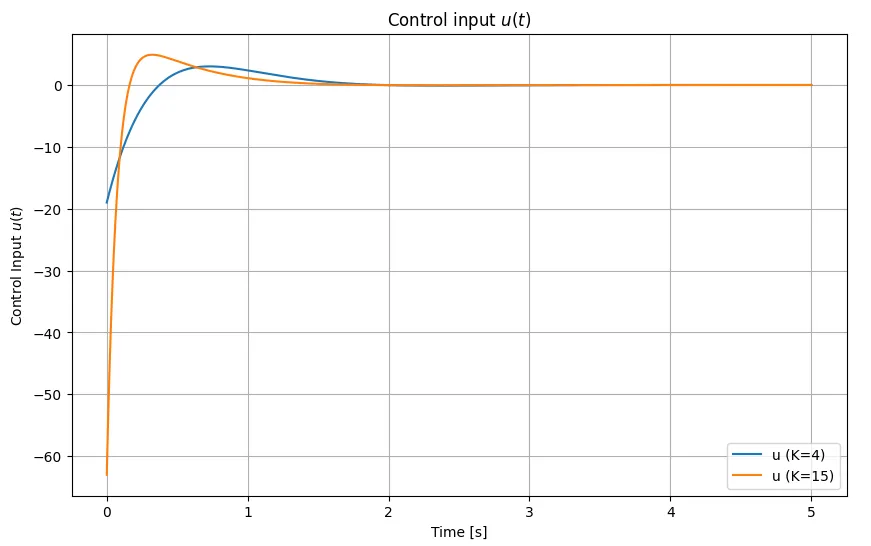
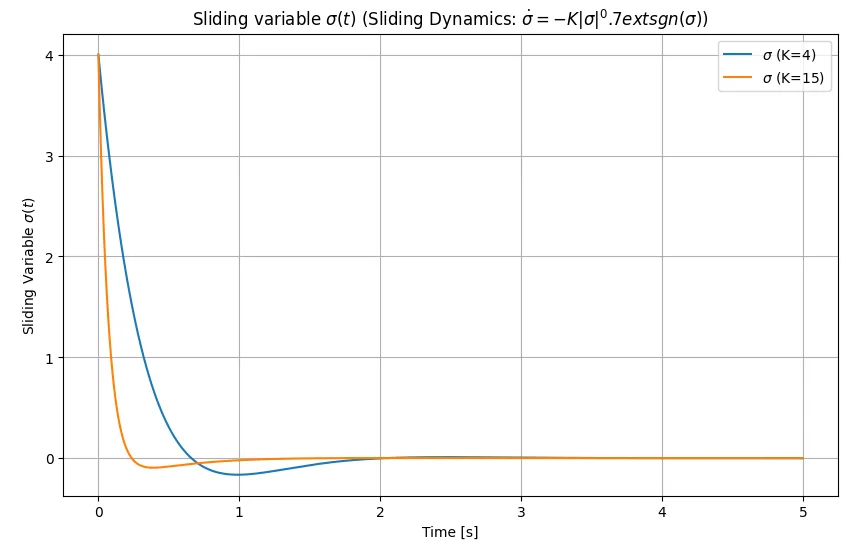
$$\dot \sigma = -K|\sigma|^\alpha \text{sgn}(\sigma) \quad (\alpha=0.7,\; K=4, 15)$$とする。
\(K=4\)でチャタリングは起こらない。また、\(K=15\)のときは状態変数の収束速度が速くなり、チャタリングも起こらない。比例到達則に比べ優れた特性となっている。

import numpy as np
from scipy.integrate import solve_ivp
import matplotlib.pyplot as plt
# Define the system matrices
A = np.array([[-2, 1, 0],
[0, 0, 1],
[0, 0, 1]])
B = np.array([[0], [0], [1]])
# Define the sliding surface
S = np.array([[1, 2, 1]])
# Define the initial conditions
x0 = np.array([0.5, 1.0, 1.5])
# Define the control law parameters (from the problem description, assuming Q=0)
# The problem description gives u = (2*x1 - x2 - 2*x3) - Q*sgn(sigma) - K*sigma
# Let's implement this directly, noting that the (2*x1 - x2 - 2*x3) term comes from the
derivative of sigma
# without the control input part: sigma_dot = S*A*x.
# S*A = [1 2 1] * [-2 1 0] = [-2+0+0 1+0+0 0+2+1] = [-2 1 3] (Mistake in
problem statement calculation? Let's stick to the form given)
# [ 0 0 1 ]
# [ 0 0 1 ]
# S*A = [1 2 1] * A = [1*(-2)+2*0+1*0, 1*1+2*0+1*0, 1*0+2*1+1*1] = [-2, 1, 3]
# S*A*x = -2*x1 + x2 + 3*x3
# S*B = [1 2 1] * [0; 0; 1] = [1]
# sigma_dot = S*A*x + S*B*u = (-2*x1 + x2 + 3*x3) + u
# The control law given is u = (2*x1 - x2 - 2*x3) - Q*sgn(sigma) - K*sigma
# Let's follow the provided control law structure.
# Define the sliding dynamics: sigma_dot = -K * |sigma|**alpha * sgn(sigma)
def sliding_dynamics(t, sigma, K, alpha):
return -K * np.abs(sigma)**alpha * np.sign(sigma)
# Define the combined system dynamics (ode for x)
def system_dynamics(t, x, K, alpha):
sigma = S @ x
# Calculate the ideal equivalent control part
# This comes from S*A*x + S*B*u_eq = 0 => u_eq = -(S*A*x) / (S*B)
# S*A*x = (-2*x[0] + x[1] + 3*x[2])
# S*B = 1
# u_eq = -(-2*x[0] + x[1] + 3*x[2]) = 2*x[0] - x[1] - 3*x[2]
# The problem states u = (2*x1 - x2 - 2*x3) - Q*sgn(sigma) - K*sigma.
# This (2*x1 - x2 - 2*x3) part seems to incorporate some canceling term.
# Let's use the specified control law formula directly. Assuming Q=0 as not specified
otherwise for the comparison part.
Q = 0 # Assuming Q=0 for this specific comparison based on the provided sliding
dynamics
u = (2*x[0] - x[1] - 2*x[2]) - Q * np.sign(sigma) - K * sigma
# Limit the control input to avoid numerical issues near sigma=0 if alpha < 1
# A simple saturation or continuous approximation might be needed for real
systems,
# but for simulation with solve_ivp, it might handle the discontinuity.
# Let's use np.sign which returns 0 for 0.
dx = A @ x + B.flatten() * u # B is column vector, u is scalar
return dx
# Time span for simulation
t_span = [0, 5]
t_eval = np.linspace(t_span[0], t_span[1], 500)
# Values of K to compare
K_values = [4, 15]
# Store results
results = {}
# Simulate for each K value
for K in K_values:
print(f"Simulating with K = {K}")
sol = solve_ivp(lambda t, x: system_dynamics(t, x, K, alpha=0.7), t_span, x0,
t_eval=t_eval, rtol=1e-6, atol=1e-9)
results[K] = sol
# Plotting the results
# Plot x(t)
plt.figure(figsize=(10, 6))
for K in K_values:
sol = results[K]
plt.plot(sol.t, sol.y[0, :], label=f'$x_1$ (K={K})')
plt.plot(sol.t, sol.y[1, :], '--', label=f'$x_2$ (K={K})')
plt.plot(sol.t, sol.y[2, :], ':', label=f'$x_3$ (K={K})')
plt.xlabel('Time [s]')
plt.ylabel('State Variables')
plt.title('State variables $x_1, x_2, x_3$')
plt.legend()
plt.grid(True)
plt.show()
# Plot u(t)
plt.figure(figsize=(10, 6))
for K in K_values:
sol = results[K]
u_values = []
for i in range(sol.y.shape[1]):
x = sol.y[:, i]
sigma = S @ x
# Assuming Q=0 as per the problem context for the sliding dynamics comparison
Q = 0
u = (2*x[0] - x[1] - 2*x[2]) - Q * np.sign(sigma) - K * sigma
u_values.append(u)
plt.plot(sol.t, u_values, label=f'u (K={K})')
plt.xlabel('Time [s]')
plt.ylabel('Control Input $u(t)$')
plt.title('Control input $u(t)$')
plt.legend()
plt.grid(True)
plt.show()
# Plot sigma(t)
plt.figure(figsize=(10, 6))
alpha_val = 0.7 # Using alpha=0.7 as specified for the sliding dynamics comparison
for K in K_values:
sol = results[K]
sigma_values = S @ sol.y
plt.plot(sol.t, sigma_values[0, :], label=f'$\sigma$ (K={K})') # sigma is a scalar, so
use [0, :]
plt.xlabel('Time [s]')
plt.ylabel('Sliding Variable $\sigma(t)$')
plt.title(f'Sliding variable $\sigma(t)$ (Sliding Dynamics: $\dot{{\sigma}} = -K
|\sigma|^{0.7} \text{{sgn}}(\sigma)$)')
plt.legend()
plt.grid(True)
plt.show()

